

The Airspace Beneath Our Feet
How drones are changing the way we explore caves...


I’ve found that the allure of aerospace (for most) lies in the open sky or the expanse of space. When aerospace engineers close their eyes, their minds generally travel upward, ignoring an entire frontier that lives right beneath our feet: subterranean environments.

In this article, I’m going to talk about subterranean environments: collapsed mines, cave networks, and the urban underground. I’m going to talk about why we should care about these environments, and the exciting aerospace, robotics, and computing research challenges that these extreme environments pose.
Down the search and rescue rabbit hole
There are a number of reasons why you might like to go down the rabbit hole, so to speak. Probably the most necessary circumstance is in the case of search and rescue.
Traditionally, search and rescue operations in underground environments have been severely limited. Underground environments pose communications blackouts as signals cannot propagate through the solid walls and complex geometric spaces associated with subterranean environments. In other words, there’s no guarantee of being able to teleoperate an aerial vehicle in these spaces. These spaces are also GPS-denied and largely uncharted, impacting an autonomous system’s ability to locate itself. On top of that, environmental hazards such as toxic gases, structural instability, or confined spaces actively threaten first responders, so human presence is often limited or logistically impossible. An autonomous solution would need to solve the problems it encounters on its own. And this is all happening in a time where rapid responses mean the difference between life and death for the rescuees.
I say this to highlight the technical challenges posed by subterranean environments: in these situations, drones need to be self-sufficient, capable of solving challenging navigation tasks on the fly, untethered, and must be able to make life-or-death decisions without human input, onboard. A solution necessitates the collaboration of mechanical engineers, roboticists, computer scientists, computer engineers, and domain experts.
Throughout this article, I’ll point to interesting research and development efforts for autonomously exploring subterranean environments. No specific criteria, just works that I have personally found interesting. Here’s the first: a morphing quadrotor or ‘foldable drone’ out of the UZH’s Robotics and Perception Group and EPFL’s Laboratory of Intelligent Systems, which was specifically designed to maneuver through narrow gaps that would have otherwise been inaccessible.
DARPA and the SubT challenge
The Defense Advanced Research Projects Agency, or DARPA (a United States Department of Defense agency), understood the scale of this challenge when they proposed the Subterranean (‘SubT’) Challenge in 2018-2021. SubT pitted 8 teams, each with real robots, against each other. Teams earned points by correctly (and autonomously) identifying artifacts placed within unfamiliar, underground environments (specifically the Louisville Mega Cavern) that were considered “too dangerous, dark, or deep to risk human lives”. The courses spanned kilometers of subterranean terrain, running through mine-shafts, urban circuits, multi-story ruins, and natural caverns with man made miscellanea.
Oh, and $5,000,000 in prize money was at stake in the final competition. Which is to say that subterranean exploration isn’t just a million dollar problem; it’s a five million dollar problem.
As an aside, in a 2023 article, Ben Recht wrote in his substack ‘arg min’:
“For better or for worse, competition is the core of all of science. Scientists love to claim they are lofty idealists in search of fundamental truths. But in reality, they are ruthlessly competitive megalomaniacs who want accolades for their brilliance to ring out for centuries. I don’t think you can understand the scientific method without understanding this core human element of savage competition.”
A somewhat pessimistic characterisation of scientists! But in this case, it is true that competition moved the needle. Here’s just a few of the papers that came out of SubT (if you’re interested):
Team CERBERUS Wins the DARPA Subterranean Challenge: Technical Overview and Lessons Learned
DARPA Subterranean Challenge: Multi-robotic Exploration of Underground Environments
NeBula: TEAM CoSTAR’s Robotic Autonomy Solution that Won Phase II of DARPA Subterranean Challenge
An Addendum to NeBula: Toward Extending Team CoSTAR’s Solution to Larger Scale Environments
Resilient and Modular Subterranean Exploration with a Team of Roving and Flying Robots
There’s too much to distill in this short article, but approaches were distinct: Team CERBERUS built a hybrid “system‐of‐systems” that combined legged quadrupeds and flying UAVs under a unified control approach. They used robust whole-body control and multi‑modal, multi-robot perception so that the robots could traverse underground terrain and localize even under heavy sensor degradation.

In contrast, the CTU-CRAS team deployed a heterogeneous fleet of wheeled UGVs and drones for exploration. CTU-CRAS emphasized a unique communication architecture – droppable relay “Mote” nodes to extend connectivity – so that the distributed team could explore and report artifacts in tunnels without relying on infrastructure.

Team CoSTAR’s solution (“NeBula”) was distinctive for its uncertainty‐aware, belief‐space autonomy framework. NeBula integrates semantic mapping, multi-modal localization, probabilistic traversability analysis and global planning, which lets heterogeneous robots operate within a unified autonomy stack.
For the sake of scientific exploration
But we’re actually motivated to explore subterranean environments for reasons beyond disaster response and DARPA challenges. What about purely scientific endeavors?
I think three really neat applications of aerial vehicles in caves concern 1) cave surveying and mapping, 2) archaeology, and 3) biodiversity quantification. In each of these applications domains, traditional approaches have involved laborious efforts from scientists to schlep their equipment into remote, dangerous, and confined subterranean environments, to complete some scientific process or analysis. In each case, autonomous aerial vehicles can be used to aid in completing these scientific tasks.
If you want to know more on these three topics, then check out the following resources…
Wennie Tabib et al.’s “Autonomous Cave Surveying With an Aerial Robot”, where a cave in total darkness is surveyed autonomously with a drone equipped with a depth camera, vision camera, and various lights. Awesome paper in my opinion! Videos here:
KJR’s drone-based approach to preserving Australian heritage assets, in particular Aboriginal rock art and cave paintings over an area greater than 5000 acres. As an Australian, this is particularly interesting, as in May 2020 the mining giant Rio Tinto destroyed a cave system in Jukan Gorge that featured 46,000 year old evidence of continuous human habitation, as a part of mining efforts. This event really elevated the preservation of cultural heritage assets in our national conversation. Video on KJR and company’s important work here:
(and you can also check out their 3D data captures of caves in-browser which are particularly neat: https://kjr.com.au/west-yalanji/.)
The Western Australian Biodiversity Science Institute’s research program “Shedding New Light on the Cryptic World of Subterranean Fauna”. In this document, the cultural, ecological, and economic value of identifying cave-dwelling fauna is outlined. In particular, lightweight methods for quantifying biodiversity (i.e. how much of a species population lives in a certain area) are outlined, in particular eDNA approaches and meta-barcoding. Recently, research has been published on the use of drones for collecting eDNA samples, and I think research that connects this to cave dwelling troglofauna and stygofauna could be a real slam dunk. In other words, I think it’s possible to use drones to collect subterranean biological samples and quantify the biodiversity of caves in a safe, replicable, and scalable way, thus enabling us to learn more about our least understood critters. Document here (warning: it’s long).
If we continue in the direction of scientific endeavors we reach an extremely interesting application of aerial vehicles in subterranean environments: exploring cave environments on other worlds. Particularly craters and lava tubes on the Moon and Mars. In fact, NASA and other agencies routinely use Earth caves as stand-ins for extraterrestrial ones.
For example, NASA’s BRAILLE project (“Biologic and Resource Analog Investigations in Low Light Environments”) sent a rover into lava tubes in California to study cave microbes and test life-detection techniques as proxies for Mars. Likewise, scientists have explored Hawaiian lava tubes (Mauna Loa) and California’s Medicine Lake volcano as Mars/Moon analogs.
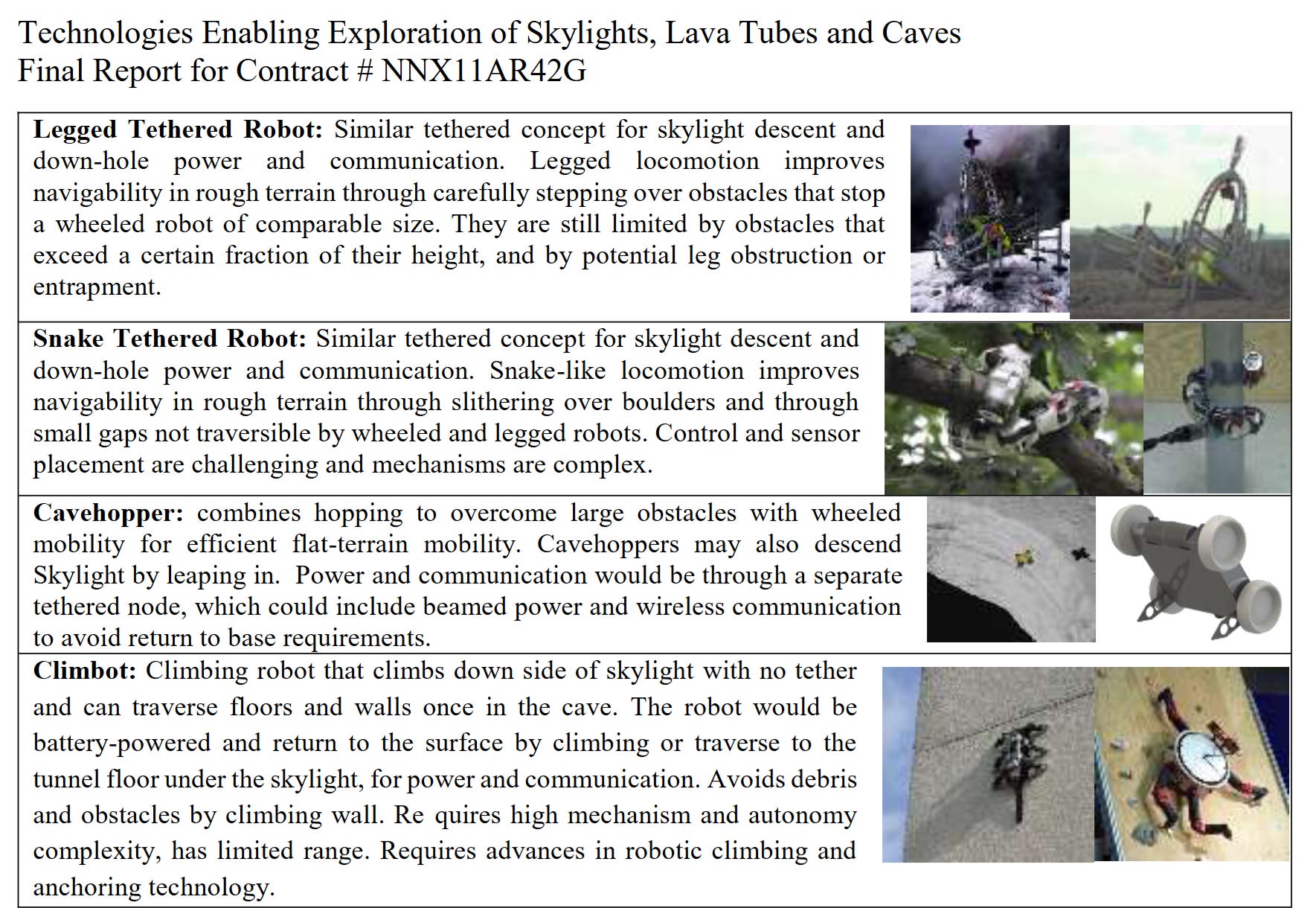
These analogs inform future space missions: for instance, a NASA NIAC study proposed a “Spelunker” mission to send hybrid rovers down a lunar lava tube skylight, using a tethered lander and multiple hopping/rolling bots to explore underground. In short, robotic teams now routinely practice subterranean exploration on Earth – from domestic cave networks to volcanic tubes – to prepare for finding water, life, and safe havens on the Moon and Mars.
In summary
So that’s a high level overview on subterranean exploration with aerial vehicles. Hopefully, in reading this article, you’ve gotten as excited about aerospace in the underground as I have. I’ve also created a video/resource dump below that talks more about some of the research that we touched on (and research that I had to omit for space). Check them out below if you're interested!
I hope that next time you think about important endeavors in aerospace, that you consider the airspace that lives right beneath your feet… 🦇🦇🦇
Cheers,
-Ike
Link dump
DARPA Subterranean Challenge Final Event Compilation:
Mykel Kochenderfer at Stanford University talks about robots exploring caves:
Quadrupeds explore caves in the PNW (Lava Beds National Monument) as an analog for life on Mars (NASA Braille team led by Jen Blank):
NASA JPL’s NeBula system exploring Martian-like caves:
Hexapedal robots explore cave systems in South Australia:
A cave surveying robot from CMU’s Resilient Intelligent Systems Lab undergoes in-the-field hardware tests:
And a more technical explanation of their research:
Exyn Technologies’ LIDAR-based autonomous cave drone:
Crash proof ‘Gimball drone’ uses a shock absorbing frame to explore ice caves in the Swiss Alps:
The ‘DelFly Nimble’ - a drone that uses flapping wings for locomotion:
A foldable drone inspired by birds morphs to change shape and size for superior navigation in normally inaccessible environments:
(Congrats on getting all the way to the deepest depths of this article!)